Online trajectory generation for industrial robot with 3D camera
Topic outline
-
- Time: < 1h
- Language: English
- Access: Free
- Level: Intermediate
-
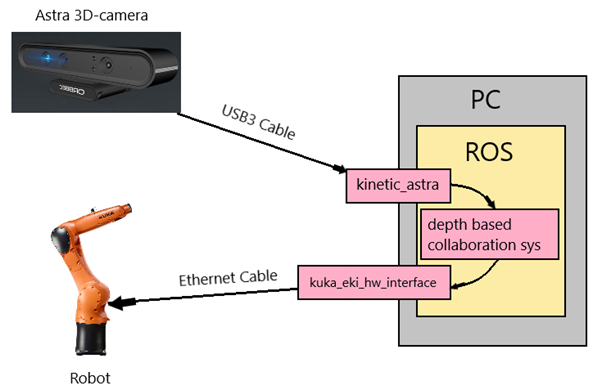
Module offers a flexible and adaptive way of generating robot trajectories for human-robot collaboration based on information from 3D-camera(s). Module can be utilized in example with bin picking applications including work pieces with varying physical characteristics and random orientation. Another way of utilizing module is processing task including processing targets of varying locations in example assembly.
1) Introduction Cameras And ROS
2) Location and installation of camera
3) Interfacing and configuring camera with ROS
4) Interfacing and configuring robot with ROS
By the end of this training participants will gain knowledge on how to set-up ROS environment for dynamic robot trajectory generation.
-
Developer version