Use Case 1.1: Real time dynamic motion planning for industrial robots
Topic outline
-
This demonstrator goal is to enable more flexible picking application which can serve the needs for the growing SME market. The current project will enable the use of real time dynamic motion planning in many applications in the future including human robot applications.
Some more details about DynaMo Demonstration
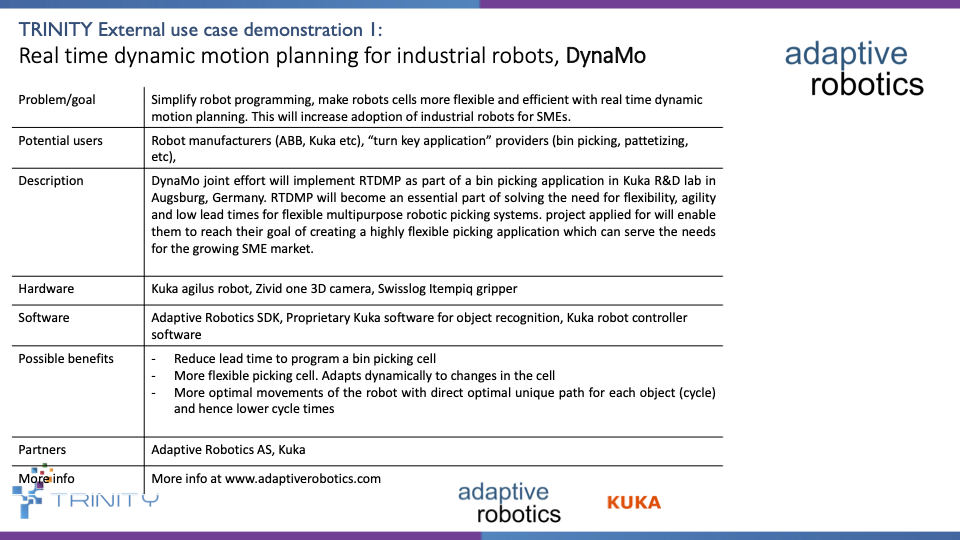
More info: https://www.adaptiverobotics.com/, TRINITY Website (DynaMo)
-