Skip to main content
Side panel
Home
More
Log in
Home
Open course index
Course info
Course
More
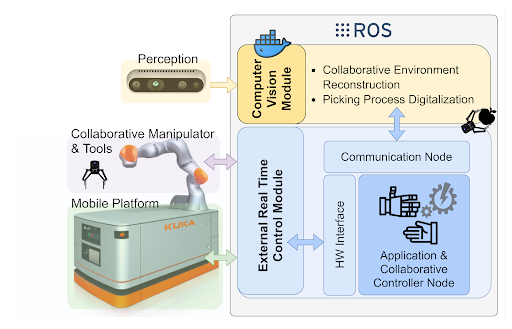
Use Case 2.6: Dynamic collaborative control of mobile manipulators for complex picking